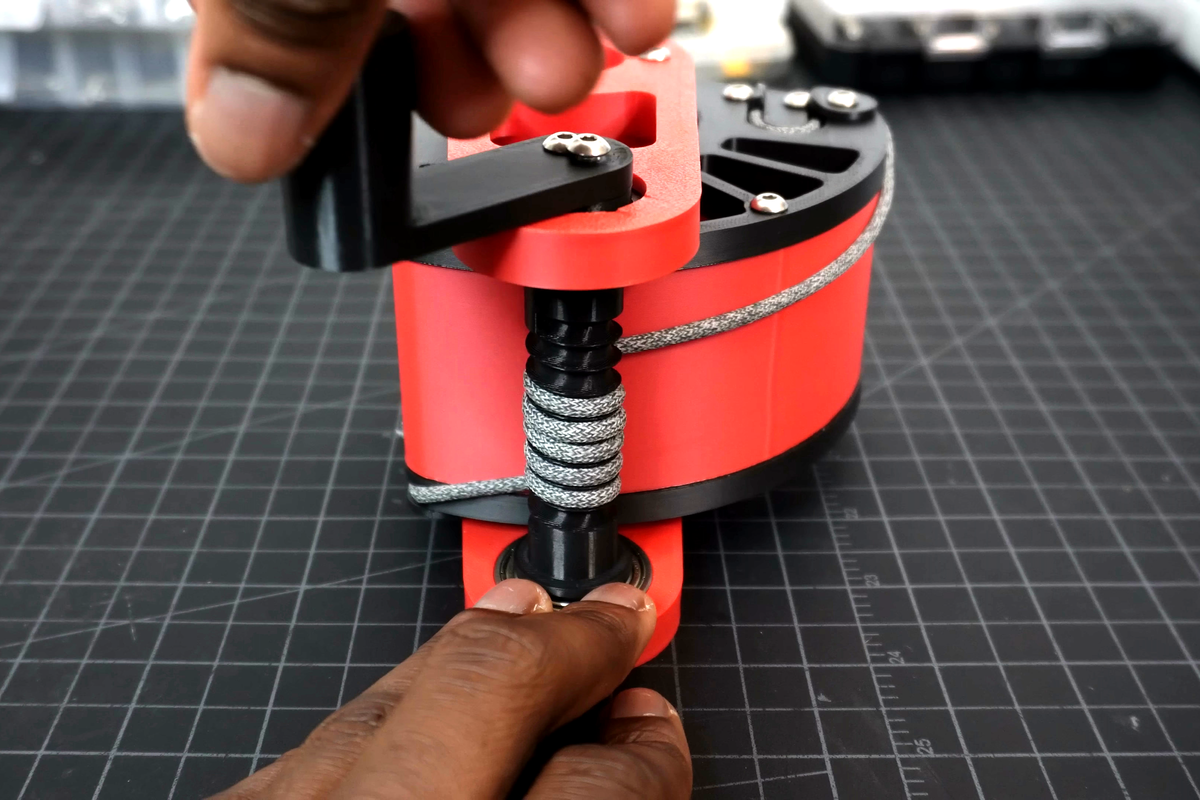
Zero backlash, high “gear” reduction, high torque transparency, silent operation, and low cost. What is this miracle speed reduction technology, you ask? Well, it’s shoelaces and a bunch of 3D printed plastic, at least in [Aead Musa]’s latest installment in his series on developing his own robot dog.
OK, the shoelaces were only used in the first proof of concept. [Aead] shortly upgrades to steel cable, and finds out that steel fatigues and snaps after a few hours. He settles on Dyneema DM-20, a flexible yet non-stretching synthetic rope.
Before it’s all over, he got a five-bar linkage plotting with a pencil on the table and a quadriped leg jumping up and down on the table — to failure. All in all, it points to a great future, and we can’t wait to see the dog-bot that’s going to come out of this.
There’s nothing secret about using capstan drives, but we often wonder why we don’t see cable-powered robotics used more in the hacker world. [Aead] makes the case that it pairs better with 3D printing than gears, where the surface irregularities really bind. If you want to get a jumpstart, the test fixture that he’s using is available on GitHub.
If you want to learn more about capstan drives, you absolutely need to check out our own [Sonya Vasquez]’s Cable Mechanism Maths. She brought some demos of her gear reduction mechanisms to Supercon, and they just feel like butter. (If I were a robot, that’s how I’d want my knees to feel.)