One of the primary goals of wearable technology is to provide the user with capabilities and data that exceed their current abilities. And for motion, this has traditionally existed in the form of electrical muscle stimulation (EMS), where current is applied via electrodes to muscles, or as external motors and gearing that forcefully manipulate limbs. Sitting between these two approaches is the Magnus project by a group of researchers from Tokyo.
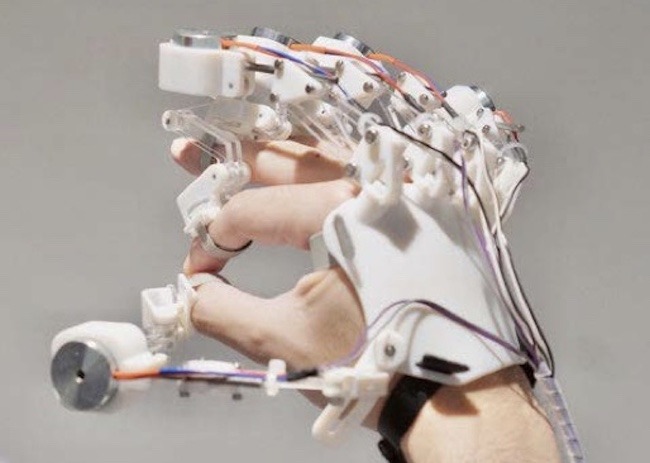
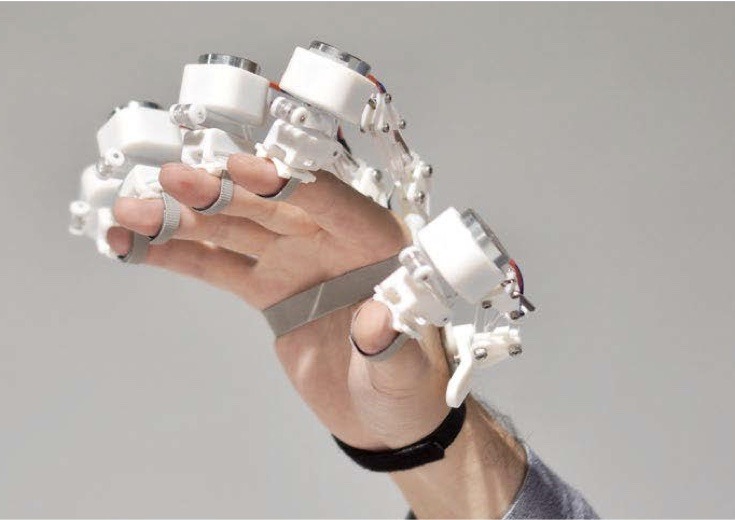
Instead of producing motion from motors or direct electrical impulses, this 3D-printed exoskeleton utilizes a series of electromagnets mounted onto a rigid frame that sits atop a wearer’s hand. Each unit, worn on an individual finger, contains an electromagnet above, a permanent magnet below, and a flexible joint between the two. In the “pulling” state, the finger experiences resistance when attempting to move downwards, whereas a “pushing” state can force the finger to be quickly pushed away and experience resistance when moving back up. An absence of power to the electromagnet allows the finger to move about freely.
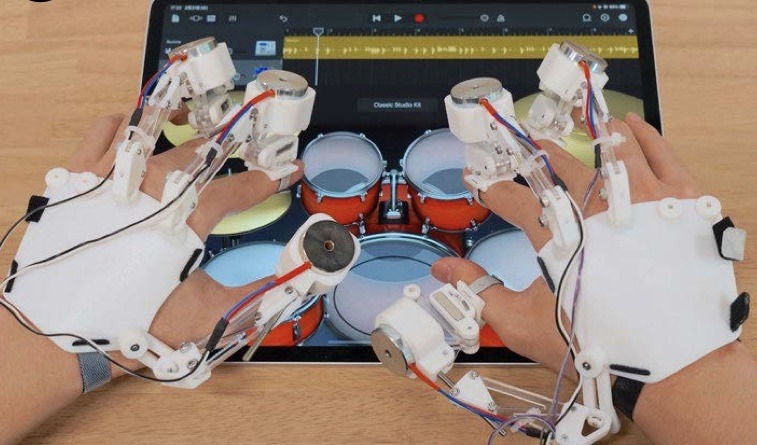
Every hand-worn unit is controlled via an Arduino Nano 33 BLE while 25V power is provided by several MDD10A driver boards. To demonstrate their concept, the researchers developed a pair of mobile apps that could communicate with Magnus. The drumming game showed how faster reflexes were possible in the push mode, and the first-person shooter exhibited how resistance on the index finger could simulate a trigger pull.
More information about Magnus can be found in the team’s published paper.
Image credit: J. Nishida et al.